

Details
Model :
- STVF170-X-M2
- STVF170-Xθ-M2
- STVF170-XY-M2
- STVF170-XYθ-M2
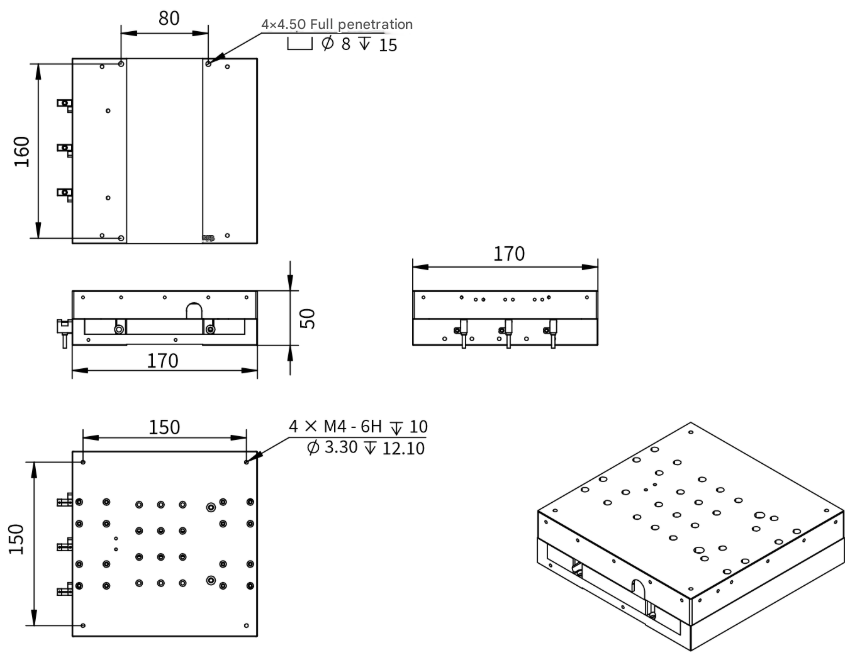
Dimension :
- STVF170-X-M2
- STVF170-Xθ-M2

- STVF170-XY-M2

- STVF170-XYθ-M2
.png)
Specifications :
- STVF170-X-M2
| Parameter | X-axis |
| Continuous thrust (N) | 105 |
| Peak thrust (N) | 350 |
| Continuous Current (Arms) | 3 |
| Peak current (Arms) | 13.8 |
| Positioning time (ms) | <100 |
| Allowable load (Kg) | <12 |
| Resolution (um) | 1 |
| Repeat accuracy (um) | ±2.5 |
| Straightness (um) | ≤10 |
| Flatness (um) | ≤10 |
| Stroke (mm) | ±10 |
| Weight (kg) | 5.4 |
- STVF170-Xθ-M2
| Parameter | X-axis | Parameter | θ axis | |
| Continuous thrust (N) | 105 | Continuous torque (Nm) | 4 | |
| Peak thrust (N) | 350 | Peak torque (Nm) | 12 | |
| Continuous Current (Arms) | 3 | Continuous Current (Arms) | 3 | |
| Peak current (Arms) | 13.8 | Peak current (Arms) | 9 | |
| Positioning time (ms) | <100 | Rated speed (rpm) | 120 | |
| Allowable load (Kg) | <12 | Maximum speed (rpm) | 240 | |
| Resolution (um) | 1 | Repeat positioning accuracy (°) | ±2 | |
| Repeat accuracy (um) | ± 2.5 | Absolute positioning accuracy (°) | ±20 | |
| Straightness (um) | ≤10 | Angle range (°) | 360° | |
| Flatness (um) | ≤10 | Diameter (mm) | 170 | |
| Stroke (mm) | ±10 | Rotor moment of inertia (KG.m²) | 0.0102 | |
| Weight (kg) | 5.4 | Weight(kg) | 4.5 | |
| Platform flatness(um) | ±5 | |||
| Platform size L*W*H(mm) (including sensor) | 170 × 170 × 91.7 | |||
| Platform weight (kg) | 9.9 |
- STVF170-XY-M2
| Parameter | X-axis | Y-axis |
| Continuous thrust(N) | 105 | |
| Peak thrust(N) | 350 | |
| Continuous Current(Arms) | 3 | |
| Peak current (Arms) | 13.8 | |
| Positioning time (ms) | <100 | |
| Allowable load (Kg) | <12 | < 12 + X |
| Resolution(um) | 1 | |
| Repeat accuracy(um) | ± 2.5 | |
| Straightness(um) | ≤10 | |
| Flatness(um) | ≤10 | |
| Stroke(mm) | ± 10 | |
| Weight(Kg) | 5.4 | 5 |
| Platform Fitness (um) | ±5 | |
| Platform size L × W × H (mm) (excluding sensor) | 170 × 170 × 86 | |
| Platform weight (kg) | 10.4 | |
- STVF170-XYθ-M2
| Parameter | X-axis | Y-axis | Parameter | θ axis | |
| Continuous thrust(N) | 105 | Continuous torque (Nm) | 4 | ||
| Peak thrust(N) | 350 | Peak torque (Nm) | 12 | ||
| Continuous Current(Arms) | 3 | Continuous Current (Arms) | 3 | ||
| Peak current (Arms) | 13.8 | Peak current (Arms) | 9 | ||
| Positioning time (ms) | <100 | Rated speed (rpm) | 120 | ||
| Allowable load (Kg) | < 12 | < 12 + X | Maximum speed (rpm) | 240 | |
| Resolution(um) | 1 | Repeat positioning accuracy (°) | ± 2 | ||
| Repeat accuracy(um) | ± 2.5 | Absolute positioning accuracy (°) | ± 20 | ||
| Straightness(um) | ≤10 | Angle range (°) | 360° | ||
| Flatness(um) | ≤10 | Diameter (mm) | 170 | ||
| Stroke(mm) | ± 10 | Rotor moment of inertia (KG.m²) | 0.0102 | ||
| Weight(Kg) | 5.4 | 5 | Weight (kg) | 4.5 | |
| Platform Fitness (um) | ±5 | ||||
| Platform size L × W × H (mm) (excluding sensor) | 170 × 170 × 127.7 | ||||
| Platform weight (kg) | 15 | ||||
View more about Micro Positioning Stage (STVF170 Series) on main site